Технология применения дистанционноуправляемых мобильных комплексов.Батанов
Александр Федорович ТЕХНОЛОГИЯ ПРИМЕНЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМЫХ МОБИЛЬНЫХ КОМПЛЕКСОВ
В последнее время много говорят о создании малолюдных и безлюдных технологий выполнения аварийно-спасательных и специальных работ особого риска, в первую очередь подразумевая при этом оснащение спасательных подразделений мобильными роботами и дистанционно управляемыми средствами. Между тем, успешная ликвидация последствий аварий во многом зависит не только от технических возможностей роботов, но и от организации, способов и приемов ведения аварийно-спасательных работ, включающих: - анализ оперативной обстановки, т.е.
совокупности факторов и условий, в которых
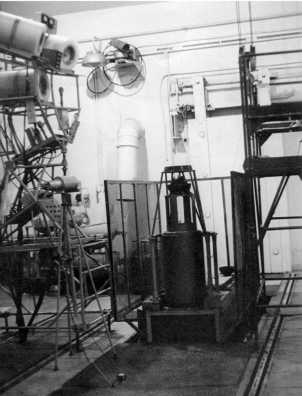
осуществляются подготовка и ведение работ; Рассмотрим технологию применения дистанционно управляемых мобильных комплексов на примере ликвидации последствий радиационной аварии в г. Саров. Оперативная обстановка 17 июня 1997 года в 10 часов 50 минут в Лаборатории Всероссийского Научно-исследовательского института экспериментальной физики (ВНИИЭФ) при монтаже критической сборки на критическом стенде1 вследствие нарушения регламента работ создались условия для возникновения самопроизвольной цепной реакции. Произошла ядерная вспышка с резким повышением температуры сборки и одновременным образованием мощного нейтронного излучения. Мощный поток нейтронов инициировал возникновение наведенного жесткого гамма-излучения. В результате реакции сборка стала работать как постоянный источник тепла и нейтронов. Сотрудник ядерного центра, проводивший эксперимент, получил смертельную дозу облучения. Примечание 1. Критический стенд - комплекс, включающий ядерную критическую сборку и оборудование, необходимое для проведения экспериментов, управления критсборкой и радиационной безопасности и позволяющий осуществлять управляемую реакцию деления ядер в заданных условиях. Критический стенд (рис. 1) размещался в специальном здании в центре изолированного помещения - бокса - прямоугольной (в плане) формы. Пол бокса бетонный, покрыт специальным пластиком. Кабели питания и дистанционного управления оборудованием, а также телеметрии располагались в прямоугольных каналах, закрытых стальными листами. Два входа в бокс, расположенные напротив друг друга, закрывались специальными дверями ? шиберами и “пробками”, довольно сложными и тяжелыми сооружениями, приводимыми в движение электроприводами. Шиберы перемещались вдоль стен внутри бокса, а “пробки” вдвигались в дверные проемы снаружи. Бокс был оборудован электрическим краном с зоной обслуживания, соответствующей помещению, за исключением полосы шириной около 2 м вдоль стен. Управление критстендом и краном осуществлялось дистанционно с центрального пульта, расположенного в соседнем помещении - пультовой. Наблюдение за выполнением операций осуществлялось с помощь перископа. Особенность сложившейся ситуации заключалась в том, что в боксе находились контейнеры с радиоактивными материалами. Повышение температуры критсборки могло привести к тепловому взрыву и возгоранию радиоактивных материалов с образованием аэрозоля, который при выбросе из помещения лаборатории вызвал бы сильное радиоактивное загрязнение воздуха и местности. Удаление контейнеров из бокса и перевод сборки в подкритическое состояние вручную” были невозможны, т.к. мощный нейтронный поток представлял собой смертельную опасность для людей. Поэтому основным средством ликвидации последствий аварии должны были стать дистанционно управляемые мобильные комплексы (роботы). Мобильные роботы К работам были привлечены все доступные на тот момент робототехнические средства, пригодные к действиям внутри помещения:
Мобильный робот MV-4 (фото 2) производства фирмы Тelerob (ФРГ) предназначен главным образом для работы с опасными объектами на предприятиях атомной энергетики и химической промышленности. Также применяется в составе комплекса TEL600 при выполнении работ с неразорвавшимися боеприпасами и взрывоопасными предметами. Робот имеет корпус коробчатого типа, двухгусеничную ходовую часть с подрессоренными опорными катками, манипулятор, телекамеры переднего и заднего обзора. Манипулятор робота имеет 6 степеней свободы с возможностью вращения в горизонтальной плоскости на 360° . Захватное устройство снабжено датчиком силы, который позволяет оператору контролировать усилие сжатия захватного устройства. Манипулятор может двигаться в вертикальной плоскости вверх на 100° и вниз на 80° относительно корпуса. Робот управляется по кабелю или по радио с центрального пульта управления. В качестве дополнительного оборудования MV-4 может быть оснащен телекамерами с переменным фокусным расстоянием, дальномером и микрофоном для передачи речевых команд и другими специальными приспособлениями. Мобильный робототехнический комплекс МРК-252 (фото 3) разработан в МГТУ им. Н.Э.Баумана (Россия) и предназначен для проведения взрывотехнических работ в составе соответствующих подразделений ФСБ и МЧС России. Примечание 2. В 1997 г. МРК-25 являлся экспериментальным комплексом и не проходил полномасштабных испытаний. Конструктивно МРК-25 представляет собой гусеничное транспортное средство с движителем переменной конфигурации, в коробчатом корпусе которого размещены блоки системы управления, бортовая часть канала связи и аккумуляторная батарея, на корпусе робота монтируется манипулятор или другое технологическое оборудование. Робот оснащается телевизионной системой, системой освещения, блоком акустической обратной связи, сиреной. Все исполнительные механизмы электромеханического типа с двигателями постоянного тока. Управляется робот с поста дистанционного управления, состоящего из пульта управления, двух мониторов, пультового блока канала связи и аккумуляторной батареи, размещенных на колесной стойке, что обеспечивает высокую мобильность при разворачивании комплекса. Управление может осуществляться как по кабелю, так и по радио. Выбор варианта канала связи производится в зависимости от оперативной обстановки и осуществляется подключением (отключением) кабельного разъема и переключением тумблера на борту робота. Для обеспечения управления с рук пульт управления выполнен съемным. Многофункциональный мобильный робот HOBO (фото 4) фирмы Kentree (Ирландия) предназначен, в первую очередь, для применения в составе подразделений силовых структур при выполнении взрывотехнических работ и проведении антитеррористических операций. Возможно использование робота при борьбе с огнем, а также на предприятиях атомной энергетики и химической промышленности для работ с радиоактивными и ядовитыми веществами и отходами производства.
Машина построена по модульному принципу, что облегчает ее обслуживание и перенастраиваемость. Транспортный модуль HOBO имеет 6 колес. Для повышения адаптации машины к поверхности сложного профиля ее корпус выполнен в виде секций, соединенных специальными шарнирами, обеспечивающими возможность поворота крайних осей относительно продольной оси корпуса машины. При этом все колеса являются ведущими. Энергообеспечение от аккумуляторов (время непрерывной работы не менее 2 часов); возможна работа от сети переменного тока напряжением 110 или 220 В. В отличие от MV-4 и МРК-25 модуль манипулятора HOBO имеет гидравлический привод, что обеспечивает максимальную грузоподъемность до 75 кг. Малогабаритный мобильный робот RASCAL (фото 5) той же фирмы используется совместно с более тяжелыми машинами в составе взрывотехнических подразделений. Малая масса робота (всего 33 кг) и небольшие габариты делают возможным его переноску силами одного человека. Робот управляется по радио на расстоянии до 250 м, однако при необходимости работы в режиме радиомолчания возможно управление по кабелю. Пульт управления МРК RASCAL может быть использован для управления другими роботами фирмы KENTREE, что очень удобно, когда для выполнения работ требуется применять роботы различных размеров и назначения. Технические характеристики рассмотренных роботов приведены в таблице 1 Таблица 1 Технические характеристики мобильных роботов
Организация и планирование работ Общее руководство операцией по ликвидации последствий аварии осуществляла комиссия Минатома России. Все работы по ликвидации выполнялись сводной оперативной группой, состоящей из специалистов центра ВНИИЭФ, Министерства по чрезвычайным ситуациям (МЧС) России, МГТУ им. Н.Э. Баумана и Федеральной службы безопасности (ФСБ) России. Срочное изготовление приспособлений, инструментов и навесного оборудования для мобильных роботов обеспечивал завод ВНИИЭФ, работавший круглосуточно. Перед выполнением работ с помощью роботов были проведены:
Примечание После аварии через дверной проем цветной телекамерой американского производства на ПЗС-матрице был снят видеофильм. Телекамера проработала только 15 минут и вышла из строя из-за действия нейтронного излучения. Расчеты, выполненные специалистами ВНИИЭФ, показали, что в боксе с аварийной критсборкой телекамеры и блоки системы управления роботов “продержатся” не более 4 минут. Этого времени явно было недостаточно для проведения всех необходимых работ. Для защиты электронных блоков и телекамер были подобраны соответствующие материалы: парафин, полиэтилен, полипропилен (кадмированный и борированный). Блоки системы управления, расположенные в корпусе, засыпались гранулами полиэтилена и полипропилена. Дополнительно на корпусе закреплялись пластины из этих же материалов. Телекамеры заливались расплавленным парафином с полиэтиленовой кадмированной крошкой. После застывания парафина телекамеры оказывались в коконе с большим козырьком над объективом (фото 6). Опыт применения защиты оказался удачным: система управления работала без сбоев, и хотя на экране мониторов через 8 минут после начала работы телекамер МРК-25 в помещении со сборкой, появилось небольшое число мелких белых точек, их количество и яркость не увеличивались на протяжении выполнения всех операций. Технология установки защитных материалов на мобильный робот отрабатывалась на МРК-25, а затем, по освоенной методике, защитные материалы закреплялись на MV-4 и HOBO. Опыт Чернобыля показал, что для уверенного управления мобильным роботом необходима непрерывная визуальная информация о месте работы с нескольких ракурсов. Для непрерывного контроля местоположения перемещающегося робота в помещении и удобства работы оператора только телекамер, установленных на самом роботе, недостаточно. Поэтому была продумана и реализована система размещения дополнительных выносных телекамер. К сожалению, радиационно-стойких телекамер, которые можно было бы установить в боксе, не было, а обычная телекамера, которой проводилась видеосъемка помещения через дверной проем, вышла из строя. Были применены дополнительные телекамеры, входящие в состав комплексов HOBO, RASCAL и MV-4. Одна из телекамер была присоединена к перископу, по которому из помещения пультовой, где находился пост оператора, можно было наблюдать за всем, что происходило в боксе. Вторая, установленная на поворотном устройстве у входа в бокс таким образом, чтобы на нее не могло попасть прямое нейтронное излучение, размещалась в соседнем с лабораторией помещении. Она позволяла видеть через дверной проем ту часть помещения, в которой располагались контейнеры с радиоактивными материалами. Специально выделенные сотрудники управляли поворотной телекамерой и перископом по команде оператора работающего робота или руководителя работ. Камера робота RASCAL, размещенного за оператором работающего робота, и наведенная на его мониторы, передавала информацию о ходе работ из помещения пультовой на монитор, установленный в микроавтобусе подвижной взрывотехнической лаборатории, в котором находились руководители операции и сотрудники, не занятые непосредственно в проведении работ. Тактика движения робота в боксе определялась, во-первых, необходимостью сокращения времени пребывания машины в зоне действия нейтронного потока и, во-вторых, требованием не подставлять под нейтронный поток слабозащищенные борта и объективы телекамер. Для выполнения первого условия: - манипулятор разворачивался в рабочее
положение в зоне биологической защиты; Чтобы выполнить второе условие, корпус робота устанавливался к источнику радиации носовой частью, а телекамеры не разворачивались на углы, при которых излучение напрямую воздействовало бы на объектив. Движение осуществлялось в основном вперед и назад без разворотов на 1800 и 3600, места установки контейнеров и других устройств определялись заранее, и движение робота отрабатывалось до автоматизма, кабели и шланги при этом укладывались по заранее определенной схеме. После оценки обстановки был принят план ликвидации последствий аварии, включавший три этапа:
Для каждого этапа работ были определены: рабочий робот (выполняющий основные операции), страхующий робот (обеспечивающий эвакуацию рабочего робота в случае выхода его из строя под воздействием радиации и продолжающий выполнение незавершенных работ) и резервный робот. Назначение роботов определялось с учетом их технических возможностей и по результатам предварительной отработки операций в помещении-аналоге. На первом этапе эвакуацию пяти контейнеров из бокса должен был проводить МРК-25. MV-4 страховал МРК-25, а HOBO находился в резерве. На втором этапе навешивание на крюк электрического крана блока вакуумного захвата со шлангом проводилось с помощью MV-4. МРК-25 страховал MV-4. HOBO находился в резерве. Эвакуация контейнеров с помощью МРК-25 В боксе находились пять контейнеров с радиоактивными материалами, каждый массой около 40 кг. Контейнеры были установлены у левой, от входа в бокс, стены на расстоянии около 6 метров от входа. Через перископ из-за ограниченного угла зрения были видны крышки только двух контейнеров. Это несколько затрудняло отработку маршрута движения, так как было неизвестно точное расположение контейнеров. Номинальная грузоподъемность манипулятора МРК-25 составляла всего 15 кг. Тем не менее, было принято решение для эвакуации контейнеров использовать именно МРК-25, поскольку, во-первых, предельная (на коротком плече) грузоподъемность манипулятора почти в три раза выше, а во-вторых, приводы манипулятора имели достаточный запас по мощности. Для удобства работы с контейнерами захватное устройство манипулятора было оснащено дополнительными губками с загнутыми концами, находящими друг на друга, как клюв. Такая конструкция позволяла в случае недостаточного усилия захвата, и, как следствие, выскальзывания ручки при подъеме контейнера, вывешивать последний на дополнительных губках как на крючках. При невозможности подъема контейнера манипулятором дополнительные губки обеспечивали возможность эвакуации контейнера волоком за роботом. Дополнительно за передние рым-болты на корпусе МРК-25 был закреплен крюк на коротком поводке. Предполагалось в случае необходимости зацепить этот крюк манипулятором за ручку контейнера, а затем волоком контейнер вытащить. Перед началом работ в помещении-аналоге отрабатывались варианты движения МРК-25 к контейнерам и их эвакуации (см. табл. 2). Таблица 2 Варианты эвакуации контейнеров
Тщательная подготовка к операции принесла свои результаты: эвакуацию контейнеров провели первым способом всего за 12 минут. Общее время работ, с учетом подготовки робота к движению и открывания (закрывания) дверей составило 23 минуты. Навеска вакуумного захвата с помощью MV-4 Для перевода критической сборки в подкритическое состояние планировалось снять верхнюю медную полусферу сборки с помощью вакуумного захвата. Конструктивно вакуумный захват представлял собой алюминиевую полусферу со штуцером в верхней части, к которому с помощью хомута прикреплялся шланг. Другой конец шланга общей длиной около 35 метров соединялся с компрессором. Предполагалось полусферу вакуумного захвата с помощью дистанционно управляемого электрокрана одеть на верхнюю полусферу критической сборки, скрепить полусферы, создавая компрессором разрежение между ними, а затем, подняв краном вакуумный захват, снять медную полусферу со сборки и прекратить таким образом самопроизвольную цепную реакцию. Для навешивания вакуумного захвата на крюковую обойму крана был выбран MV-4. Отработка операции проводилась в помещении-аналоге. Первый же опыт показал, что все не так просто, как кажется. Работе мешали стропы, навешанные на кране, кроме того, крюк крана поворачивался вокруг своей оси даже при легком касании петлей захватного устройства. После 4 часов тренировок операция выполнялась в следующем порядке: - установка робота на исходной позиции
и закрепление вакуумного захвата в манипуляторе; Для проверки работоспособности вакуумного захвата использовали макет полусферы массой в 50 кг. Надежный захват макета полусферы и уверенное выполнение подъема, спуска и движения в горизонтальной плоскости подтвердили работоспособность конструкции. При выполнении операции сначала все шло по плану -- MV-4 благополучно въехал в бокс и навесил вакуумный захват на крюк. Неприятности начались, когда, выполнив свою задачу, робот задним ходом двинулся к выходу из бокса. При движении под гусеницу попали собственный кабель и шланг вакуумного захвата. Гусеница перемотала кабель и шланг под собой и затянула их на корпус. Робот встал и не мог дальше двигаться, до входа оставалось 1,5 метра. Работу необходимо было продолжать, поэтому решили оставить MV-4 в боксе. Шибер и пробку” закрыли, придавив кабель управления MV-4. Вакуумный захват наводили на сборку медленно, с остановками сначала через 10, а затем через 5 см, измеряя изменение нейтронного потока. После захвата верхней части сборки при попытке подъема сорвался шланг, оставив полусферу захватного устройства на сборке. Произошло резкое увеличение нейтронного потока, который через некоторое время стабилизировался на несколько большем уровне. При разборе сложившейся ситуации было высказано предположение (которое затем экспериментально подтвердилось) о том, что под воздействием высокой температуры и нейтронного излучения резиновый шланг деформировался, потерял упругость и эластичность - стал рыхлым. При подтягивании крюком шланг выскочил из места крепления к вакуумному захвату. Изменение плана работ Выход из строя робота MV-4 на втором этапе и неудачная попытка снятия полусферы критсборки с помощью вакуумного захвата привели к изменению первоначального плана:
Эвакуация мобильного робота MV-4 с помощью МРК-25 Сложность проблемы заключалась в том, что эвакуировать MV-4 можно было только так, чтобы усилие вытягивания по направлению совпадало с продольной осью его корпуса и практически не отклонялось бы от оси дверного проема бокса. В противном случае мобильный робот при эвакуации мог развернуться и полностью перекрыть проход. Чтобы обеспечить необходимое направление, “пробку” выдвинули в крайнее положение и приварили к ее внутренней поверхности по оси “пробки” блок, через который перекинули трос с карабином, прикрепленный к лебедке. Предполагалось открыть шибер, с помощью МРК-25 завести карабин в эвакуационное кольцо MV-4, и, после возврата МРК-25 в исходное положение, лебедкой сматывая трос, вытянуть MV-4 из помещения по пути движения “пробки”. Как только закроется шибер, спасатели вручную должны были вытянуть из блока на “пробке” трос, закрепить его на лебедке и оттащить MV-4 всторону, освобождая направляющие “пробки”. Первая часть операции была проведена успешно. Трос был пропущен между гусеницами МРК-25 и длинной змейкой уложен на пол до блока на пробке”, в захватное устройство манипулятора установлен карабин. Когда открыли шибер, МРК-25 двинулся к MV-4, зацепил карабин за эвакуационное кольцо и вернулся в исходное положение. По команде руководителя работ включили лебедку и осторожно вытянули MV-4 из бокса. Вторую часть операции в соответствии с планом выполнить не удалось ? из-за отказа привода перемещения не закрылся шибер. Мощное нейтронное излучение через открытый проем не давало спасателям подойти к роботу. На помощь опять пришел МРК-25. Мобильный робот зацепил карабин в заданном месте и спасатели вытащили MV-4, после чего “пробку закрыли. Всего на выполнение этой операции с помощью МРК-25 было затрачено около 14 минут. Анализ вариантов перевода критсборки в подкритическое состояние Метод прекращения самопроизвольной цепной реакции выбирался из нескольких вариантов. Специалистами были рассмотрены: - химическое растворения медной
оболочки; Метод плавления оболочки сборки был основан на расчетах массы и формы дополнительного стального экрана, с помощью которого можно было бы поднять температуру сборки и расплавить медные оболочки. Предполагалось, что цепная реакция прекратится, когда расплавленная медь стечет и объем металла уменьшится. Опасность применения этого метода заключалась в том, что электрическим краном сложно было осуществить плавный подвод экрана. Температура могла подняться выше расчетной и тогда бы стал плавиться уран и могли появиться его аэрозоли. Тем не менее, считалось, что реакция была бы управляемой. Был изготовлен экран, навесить который на крюк крана можно было с помощью робота. Метод расстрела сборки заключался в вырывании металла тяжелыми пулями из верхней и нижней полусфер и уменьшении за счет этого критической массы. Для этой цели предлагалось использовать HOBO, приспособленный для стрельбы из ружья. Метод сверления оболочек сборки предусматривал уменьшение массы медных оболочек за счет высверливания материала. Рассматривали два варианта сверления: сверлом в патроне, зажатом захватом манипулятора HOBO и дрелью, зажатой захватом манипулятора HOBO. Эксперименты на макете сборки показали, что метод сверления малопроизводителен, кроме того, подвод значительной массы дрели мог вызвать непредсказуемый эффект. Метод разрушения оболочки кумулятивным шнуром рассматривался как один из основных в силу своей эффективности – после подрыва кумулятивного шнура, заложенного в термостойкий материал по определенной схеме, верхняя медная оболочка разделялась на четыре дольки и выпадала из обоймы сборки (фото. 7). Рассматривались два варианта установки заряда на сборку: первый - с помощью HOBO, второй - с помощью крана, на крюк которого взрывное устройство устанавливалось роботом.
В то же время прорабатывался вариант снятия верхней части сборки модернизированным вакуумным захватом. Просмотр видеофильма по первой попытке снятия сборки вакуумным захватом показал, что сборка чуть повернулась и приподнялась над ложем. Поэтому было принято решение еще раз попробовать снять сборку, используя вакуумный захват измененной конструкции -- чтобы избежать разрушения резинового шланга от теплового и нейтронного излучения, между металлический полусферой захвата и шлангом проставили метровую дюралевую трубку. Кроме способов воздействия непосредственно на сборку прорабатывались варианты снятия со стенда стальной диафрагмы, затруднявшей установку на сборку вакуумного захвата. Предполагалось снять диафрагму мощным магнитом (фото 8) с помощью HOBO или с помощью крана, на крюк которого магнит был бы установлен роботом. Снятие сборки с помощью модернизированного вакуумного захвата При отработке операции по навешиванию модернизированного вакуумного захвата на крюк электрокрана с помощью МРК-25 столкнулись с двумя проблемами:
Для решения этих проблем, во-первых, на корпусе МРК-25 установили легкий длинный ложемент из тонкой стали (фото 9), по которому при навешивании трубка захвата скользила как по направляющей, а, во-вторых, к модернизированному захвату вместо подвесного устройства прикрепили на коротком тросе карабин, предназначенный для зацепа за стропы, свисающие в виде петель с крюковой обоймы крана. Кроме того, на МРК-25 была установлена система его эвакуации в случае выхода из строя. После подготовки к проведению работ МРК-25 с карабином в захвате манипулятора, с закрепленным на ложементе вакуумным захватом и правильно уложенным шлангом, был выведен в исходное положение около входа в бокс. Как только пробка” была отведена, робот въехал в помещение, направился к крюковой обойме, опущенной в заданном месте на необходимую высоту, и зацепил карабин за петлю стропы. Затем кран поднял вакуумный захват и подвел его к критстенду. Перед проведением операции был выполнен ряд вспомогательных работ: установка около стенда с помощью МРК-25 металлического столика для размещения на нем снятой полусферы сборки; доставка роботом к стенду магнитного захвата для снятия (если будет необходимо) диафрагмы; оснащение МРК-25 пожарными стволами и пожарными рукавами для тушения возможного пожара (фото 10). Когда все было сделано, наступил этап работы крана с вакуумным захватом. Вакуумный захват “прилип” к верхней части сборки, поднял ее над стендом, перенес и поставил на столик. Сборка была переведена в подкритическое состояние. Вся операция продолжалась 50 минут. В 1 час 15 минут 24.06.1997 года работы по ликвидации последствий аварии были закончены. Ликвидация радиационной аварии в короткие сроки и без ущерба здоровью спасателей стала возможной благодаря использованию дистанционно управляемых мобильных комплексов (роботов). Полученный опыт по использованию роботов в рассмотренной ситуации позволил определить некоторые основные принципы технологии их применения при ликвидации локальных радиационных аварий. В частности:
Поскольку применение роботов сопровождается большим объемом вспомогательных работ, необходимо наличие в составе робототехнического комплекса специальной ремонтной мастерской. Успех выполняемой операции не в последнюю очередь зависит от мастерства и опыта операторов. Каждую операцию, выполняемую роботом, необходимо отрабатывать в условиях, максимально приближенных к реальным. Особенно тщательно должны быть отработаны операции, требующие взаимодействия нескольких дистанционно управляемых машин. В дополнение следует отметить, что в составе экспедиций, участвующих в ликвидации аварий с помощью роботов, желательно участие конструкторов-разработчиков или операторов-испытателей. Это позволяет им, зная конструктивные особенности роботов, полнее использовать заложенный в них потенциал для выполнения конкретных работ и накапливать опыт для дальнейшей модернизации или создания новых машин. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||