Применение гидролокаторов бокового обзора для решения задач безопасности судоходства и экологического мониторинга.СКНАРЯ
Анатолий Васильевич ПРИМЕНЕНИЕ ГИДРОЛОКАТОРОВ БОКОВОГО ОБЗОРА ДЛЯ РЕШЕНИЯ ЗАДАЧ БЕЗОПАСНОСТИ СУДОХОДСТВА И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА |
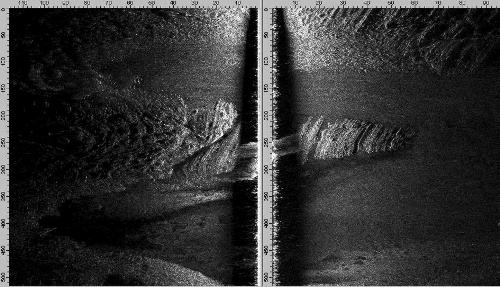
| Возрастание хозяйственной активности человека в последние десятилетия привело к активному вовлечению в эту сферу деятельности водных акваторий внутренних вод и шельфа морей, что потребовало проведение мероприятий, направленных на обеспечение безопасности при проведении работ на водных акваториях и экологического мониторинга последствий деятельности человека.. Возникла потребность в разработке как эффективных методов, так и аппаратных средств, позволяющих в кратчайшие сроки и с высоким качеством проводить такие мероприятия. К числу последних можно отнести и гидролокаторы бокового обзора (ГБО). Главным достоинством ГБО является возможность получения в реальном времени высококачественного акустического изображения дна на большой площади практически на любой глубине и в любых водоемах. Акустическое изображение дна содержит достаточно информации, которая может быть использована при решении многих задач, в том числе и таких, как обеспечение безопасности судоходства на реках и каналах, анализ влияния деятельности человека на экологию и др. Качество акустических изображений – это и лучшая детальность, и фоновая контрастность – за последние годы существенно улучшились. Это связано, в первую очередь, с широким использованием в ГБО современных цифровых методов формирования и обработки сигналов, а применение в них современной элементной базы позволило существенно уменьшить массогабаритные характеристики гидролокаторов и сделать их умными” и удобными в эксплуатации. ГБО относятся к активным гидроакустическим системам. Получение акустических изображений в гидролокаторах основано на том, что акустический сигнал, излученный передающей антенной, на пути своего распространения отражается обратно в приемную антенну от любой неоднородности в толще воды. Дно также является такой неоднородностью. И чем больше будут отличаться друг от друга акустические характеристики воды и неоднородности, тем сильнее будет отраженный сигнал. Очень хорошо, например, отражается акустический сигнал от границы вода-воздух, вода камень и очень плохо отражается от границы вода – ил. Исходя из этого, яркость на акустическом изображении будет различной и может быть использована при его анализе для решения той или иной задачи. Применение акустических сигналов в ГБО делает их незаменимыми при проведении работ на больших площадях, поскольку позволяет существенно сократить время на их обследование. Дело в том, что все другие виды колебаний (свет и радиоволны) имеют существенно большее затухание в воде и позволяют производить детальные обследования в воде на расстояниях в единицы метров. За последние годы весьма актуальной становится задача мониторинга состояния нефтяных и газовых трубопроводов (учитывая большой срок службы некоторых из них) через реки, в том числе и оперативное определение течи из них. Для решения этой задачи использование ГБО является очень актуальным, поскольку позволит бесконтактным способом в реальном времени по акустическому изображению определить места течи. Другой, не менее актуальной задачей, является исследование степени загрязнений водных акваторий. К последним относятся как загрязнение поверхности акваторий (это мусор и нефтяные пятна в первую очередь), так и загрязнения, более тяжелые, которые откладываются на дне. И если первые легко обнаруживаются даже чисто визуально, то вторые обнаружить не так легко. В этом случае применение гидролокатора также может оказаться весьма полезным, поскольку позволит оперативно произвести обзор большой площади дна и выявить для дальнейших, более детальных, исследований отдельные участки дна. В качестве примера на рис. 1 приведено акустическое изображение участка дна Черного моря в месте впадения в него реки, полученное во время испытаний ГБО “Гидра” летом 2002 года. Этот гидролокатор специально разрабатывался для работы с небольших катеров и лодок и предназначен для работы на водоемах с глубиной до 50 метров. Рабочая частота гидролокатора была выбрана 240 кГц, что позволило сделать малогабаритную антенную систему с одной стороны и получить высокое разрешение по дальности – 4 см, с другой стороны. Столь высокое разрешение по дальности вместе с использованием в гидролокаторе цифровых методов обработки и формирования сигналов позволило получать высококачественные акустические изображения дна, а использование линейно-частотномодулированного зондирующего сигнала увеличить его дальность действия. Если смотреть на акустическое изображение, то судно двигалось снизу вверх. Линия движения судна совпадает с вертикальной шкалой в центре изображения, которая показывает расстояние, пройденное судном, в условных единицах длины. Акустическое изображение разбито на две части, слева от вертикальной шкалы показано акустическое изображение дна с левого борта, а справа – с правого борта. Сверху, над акустическими изображениями дна левого и правого бортов, показаны две шкалы – эти шкалы показывают наклонную дальность, соответственно, для левого и правого изображений, в метрах. Полоса обзора для правого изображения составляет более 90 метров, а для левого – более 110 метров. Темная полоса слева и справа от вертикальной шкалы – это слой воды между приемо-передающей антенной гидролокатора и дном и по границе этой темной полосы можно судить о глубине под судном. Глубина менялась от 6 метров вверху до 10 метров внизу. В этом месте дно моря каменистое, на акустическом изображении видны горные складки в виде ярких участков, а в центре изображения – илистое русло реки на дне моря. Очень хорошо видны илистые вкрапления в виде темных пятен на рис. 2.
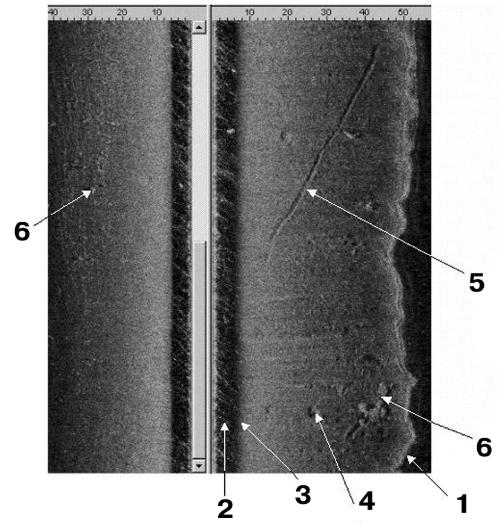
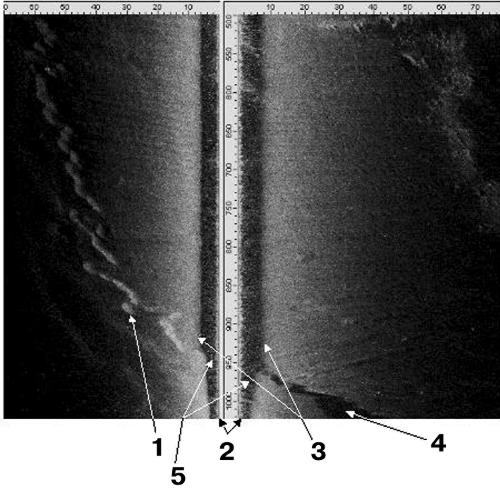
Особый класс задач, которые могут быть успешно решены с помощью ГБО – это обеспечение безопасности судоходства. Возможности ГБО для решения этой задачи иллюстрируются на следующих двух рисунках. На рис. 3 приведено акустическое изображение участка дна южной части Астраханского канала, полученное также во время испытаний гидролокатора “Гидра”. На этом рисунке хорошо видна площадь и граница работы дноуглубительной техники (обозначено цифрой 1). Глубина под судном составляла 7 метров. Цифрами 2 и 3 показаны соответственно слой воды и линия дна под судном (глубина), а цифрой 4 – небольшая яма. На рис. 4 приведено акустическое изображение участка дна, полученное также в южной части астраханского канала. Судно двигалось снизу вверх, линия движения судна обозначена на этом рисунке цифрой 2. Слева от этой линии показано акустическое изображение, полученное с левого борта судна, а справа – с правого борта судна. В центре рисунка показана условная шкала расстояния, пройденного судном, а сверху – наклонная дальность в метрах, слева –для левого борта, справа – для правого борта. Цифрой 5 показан слой воды между антенной и дном, а цифрой 3 – линия дна левого и правого бортов (первое отражение от дна). Особенностью этого галса является следующее. В самом начале (самая нижняя часть изображения) судно двигалось в стороне от основного канала, в этом месте, согласно верхней шкале, глубина составляла около 3 метров. При этом справа (цифра 4) можно видеть основной канал в виде темной полосы неправильной формы. Видно, что он достаточно узок, его ширина составляет чуть более 10 метров. Далее судно вышло на судоходную часть канала, глубина сразу увеличилась до 8 метров (согласно верхней шкале). При этом слева на акустическом изображении (1) можно видеть результаты работы дноуглубительной техники и по верхней шкале оценить границы ее работы в метрах. Хорошо видна изрезанность ее кромки.
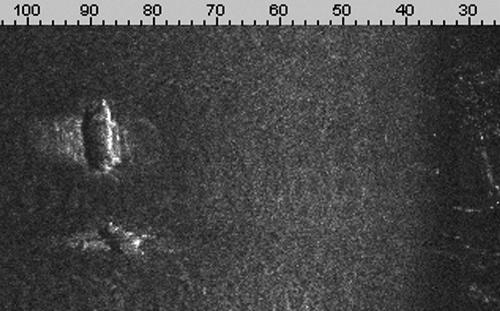
Высокая разрешающая способность гидролокаторов позволяет использовать их и как поисковую систему при очистке фарватеров в целях обеспечения безопасности судоходства. Так, на рис. 3 цифрой 6 обозначены мелкие предметы (наименьший из них имеет размер менее 1 метра) лежащие на дне, а цифрой 5 – след, оставленный на дне якорем судна. Проведение поисковых работ на море является той задачей, при решении которой ГБО играют если не первостепенную, то очень важную роль. И это связано, в первую очередь, с большой производительностью этих систем и высокой детальностью акустического изображения исследуемого участка дна. Благодаря этим характеристикам удается исследовать в достаточно сжатые по времени сроки большие участки дна и выявить для дальнейших, более детальных, исследований только отдельные из них. Далее более детальные исследования проводятся с помощью видео- или фото аппаратуры как с борта необитаемых, так и с борта обитаемых аппаратов вплоть до исследования с помощью водолазов, если последнее возможно. Примером этой технологии может служить поиск и обследование подводной лодки “Курск”, трагически погибшей в Баренцевом море. Особенно актуальным является применение ГБО для поиска объектов на больших глубинах. В этом случае наряду с приповерхностными ГБО могут использоваться и придонные ГБО (это зависит отрешаемой задачи). Первые позволяют сделать обзор большой поверхности дна, а вторые – произвести более детальный поиск на отдельных участках дна. Для проведения еще более детального поиска далее возможно использование подводных аппаратов, которые выводятся уже на известные участки дна. В середине 80-х годов такая технология применялась, например, для поиска и оконтуривания железо-марганцевых конкреций (ЖМК) на дне Индийского и Тихого океанов. В начале с помощью приповерхносоного ГБО (а это были ГБО Океан”, существующий и сейчас в объдинении Южморгеология”, и ГБО “Sonac-LF”, который был установлен на судне “Академик Йоффе” Института Океанологии им. П. П. Ширшова АН СССР) был произведен обзор поверхности участка дна океана на глубинах 5000 – 6000 метров. Эти гидролокаторы позволяют получать акустическое изображение дна в полосе до 30 км на оба борта. Другая особенность этих гидролокаторов заключалась в том, что в них впервые в мире были применены линейно-частотномодулированные зондирующие сигналы, причем они были сформированы цифровым способом и обработаны с помощью ЭВМ. Именно благодаря применению этих сигналов удалось получить такую большую полосу обзора при пиковой мощности излучения всего в несколько сотен ватт. Полученное акустическое изображение дна анализировалось и по результатам анализа опускался к дну и буксировался на небольшой высоте от него необитаемый аппарат с видео- и фото аппаратурой, а далее брались пробы грунта с помощью пробоотборников. Эта технология оказалась очень эффективной и применялась в течение нескольких лет как в АН СССР, так и в Мингео СССР. Остается она актуальной и сейчас. Другим примером применения ГБО для поиска объектов на больших глубинах является поиск затонувших подводных лодок, среди которых можно назвать и ПЛ “Комсомолец”, затонувшей на глубине более 1500 метров. ГБО позволяют обнаруживать на дне моря объекты, имеющие и существенно меньшие размеры – единицы метров. Примером этого может служить акустическое изображение, приведенное на рис. 5 – это акустическое изображение военного самолета времен второй мировой войны, который лежит на глубине около 36 метров на дне Черного моря. А на рис .6 иллюстрируется возможность проведения поисковых работ на примере более крупного объекта – парохода “Адмирал Нахимов (эти акустические изображения получены во время испытаний ГБО “Гидра”).
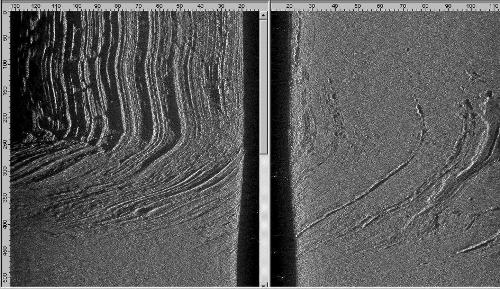
Кроме решения задачи поиска затонувших объектов как на большой, так и на малой глубинах, гидролокаторы помогают решить и другую задачу – задачу обеспечения безопасности плавания в сложной или незнакомой обстановке. Для этого используются гидролокаторы секторного обзора. Например гидролокаторы фирмы Interphase (одна из последних моделей PC 180). Также целую гамму гидролокаторов секторного обзора выпускают фирмы Furuno и Simrad. Эти гидролокаторы позволяют производить поиск, обнаружение опасных предметов или опасного поднятия дна по курсу движения судна. Решение этой задачи также является актуальной при движении в сложной ледовой обстановке, когда размеры подводной части ледника могут быть обнаружены и определены только с помощью этих гидролокаторов. В настоящее время обзор пространства под водой производится за счет сканирования одного луча как правило механическим способом, реже электронным способом. На проведение обзора пространства таким способом в большом секторе требуется достаточно большое время, что накладывает ограничения на максимальную скорость движения судна. Для быстроходных судов необходимо иначе решать задачу обзора пространства впереди по курсу – формированием нескольких лучей сразу. Для обеспечения безопасности движения по водной акватории недостаточно одного только акустического изображения. Необходимо также и карта глубин батиметрическая карта. Решение этой задачи традиционно решается с помощью однолучевых промерных эхолотов, в качестве примера можно привести серию хорошо зарекомендовавших себя отечественных эхолотов ПЛ, в частности эхолот ПЛ-5.Однако их применение для решения задач построения рельефа дна на больших площадях имеет ряд существенных недостатков – это и большое время съемки, и недостаточная точность построения рельефа дна. Для преодоления этих недостатков были разработаны многолучевые эхолоты, нашедшие в последнее время широкое применение. Однако для получения надежных результатов обследования участков дна водоемов при решении задачи обеспечения безопасности движения по ним желательно совмещать акустическое изображение участка дна и его рельеф. Это связано с тем, что только по акустическому изображению можно выявить такие опасности, как отдельно стоящие сваи или другие выступающие из дна предметы. Одним из признаков выявления таких опасностей является наличие тени от них, что хорошо видно на акустическом изображении. В качестве примера можно рассмотреть акустическое изображения дна, приведенного на рис. 7. Это акустическое изображение было получено во время испытаний гидролокатора Гидра-2 при проходе вдоль берега около г. Новороссийска. В левой части на изображении видны горные гряды в виде параллельных друг другу линий, идущих снизу вверх. Эти гряды выступают из дна, что видно по теням после каждой из них (темные участки слева от светлых полос), причем чем больше выступает гряда, тем длиннее тень.
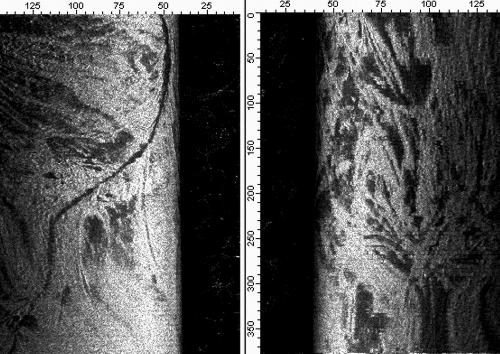
Решение этой задачи в полной мере многолучевые эхолоты не обеспечивают по причине отсутствия высококачественного акустического изображения, она может быть успешно полностью решена с помощью другого класса ГБО – интерферометрических гидролокаторов бокового обзора, представителем которого является гидрографический комплекс площадной съемки дна – “Гидра-2”, так же как и ГБО “Гидра”, разработанный в НПФ “Экран”. В качестве иллюстрации использования данных о рельефе дна при решении задачи обеспечения безопасности движения по рекам может служить рис. 8, на котором приведена батиметрическая карта участка дна астраханского канала, полученная во время испытаний гидролокатора “Гидра-2”. Эта карта была получена после обработки данных всего по одному галсу и построена в прямоугольной системе координат с шагом по глубине 0,25 метра. Из этого рисунка видно, что в средней части есть довольно крутой склон, и он совпадает с границей судоходного канала.
В заключении следует сказать, что гидролокаторы являются необходимым и важным инструментом при решении описанных выше задач и их роль и значение как в решении этих задач, так и других в дальнейшем будет только возрастать.
|