Поисковые технические средства на основе методов интроскопии. акустические поисковые системы..Ковалев Алексей Васильевич, доктор технических наук ПОИСКОВЫЕ ТЕХНИЧЕСКИЕ
СРЕДСТВА НА ОСНОВЕ МЕТОДОВ ИНТРОСКОПИИ. Классическое решение достаточного широкого круга поисковых задач, осуществляемых на основе методов интроскопии и неразрушающего контроля, предполагает выполнение в качестве первого и основного шага оптимальный выбор физического метода или их комбинации с учетом цели и содержания задачи, условий ее решения, а также особенностей объекта контроля и объекта поиска с последующей разработкой алгоритма, структурно-функциональной схемы прибора и непосредственно создание аппаратуры в совокупности с методикой контроля. Основными требованиями, предъявляемыми к выбранным методам, являются:
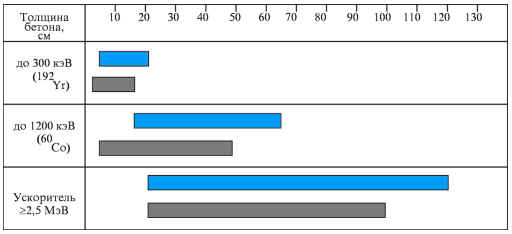
Важными факторами, определяющими окончательное принятие решения о выборе того или иного метода контроля или их комбинации, является наличие априорной информации о структуре и физических свойствах как объекта контроля, так и объекта поиска, характере взаимодействия физических полей с ними, а также условиях и допустимом времени контроля. В данной статье рассматривается акустический метод контроля, основная сфера применения которого контроль строительных конструкций (СК) из бетона и железобетона. Рассмотренный в предыдущих статьях радиационный метод ввиду своей универсальности позволяет осуществлять контроль СК из бетона и железобетона. Однако для его реализации, как правило, необходим двухсторонний подход к объекту контроля, что не всегда возможно. Для того чтобы адекватно оценить возможности акустического метода по контролю СК, его преимущества и особенности, которые проанализируем несколько ниже, кратко рассмотрим возможности радиационного метода по диагностике СК. Для обнаружения малоконтрастных дефектов в гетерогенных структурах, которыми являются бетон, железобетон и другие СК, в соответствии со сложившейся практикой применяется либо метод радиографии (для толщин более 200 мм), либо флуороскопический метод (для меньших толщин). В том и другом случаях существенное влияние на результаты контроля (выявляемость дефектов) оказывает неоднородность объекта контроля. Причем толщина слоя бетона или железобетона, в котором неоднородность структуры проявляется существенным образом, составляет величину до 200 мм. Максимальное влияние неоднородность структуры бетона оказывает при обнаружении дефектов в виде пустот или инородных включений неправильной формы. Для более толстых бетонных барьеров влияние неоднородности значительно уменьшается, что обуславливается в основном альбедными процессами. Доступные контролю толщины бетонных и железобетонных барьеров определяются величиной энергии источника первичного излучения. На рис.1 в виде гистограмм представлена информация об оптимальных толщинах бетона и железобетона, подлежащих эффективному контролю различными источниками излучения. Рис. 1. Толщина контролируемого бетона для различных источников излучения:
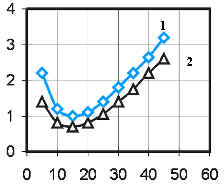
Ограничение контролируемой толщины бетонных и железобетонных конструкций 200 мм, что является типичным в подавляющем большинстве поисковых задач, позволяет остановиться на методе интроскопии, а точнее флуороскопии как основополагающем при разработке радиационных поисковых систем. К преимуществам этого метода следует отнести высокую производительность контроля, возможность многоракурсного просмотра контролируемого объекта, а также потенциальную возможность улучшения результатов контроля за счет накопления изображения, его оцифровки, математической обработки. На рис.2 представлены экспериментальные результаты по оценке выявляемости в бетоне пустот и дефектов круглого и прямоугольного сечения соответственно, а также медного провода. Рис 2a. Выявляемость
пустот в бетоне Рис 2б. Выявляемость медного стержня в бетоне. Оценочные расчеты и многократные эксперименты показывают, что при двухстороннем методе контроля бетонных и железобетонных СК методом радиационной интроскопии доступны толщины 80-200 мм при энергии излучения до 300 кэВ. При этом реально достижимые результаты по чувствительности составляют порядка от 0,8 – 1,8% до 1,5 – 2,5% по пустотам, а минимальный диаметр достоверно выявляемого медного провода не превышает 1,2 – 1,8 мм. В сравнимых условиях радиография обеспечивает большую чувствительность. Однако повысить чувствительность флуороскопических систем, достигнув в идеале параметров радиографии, удается за счет проекционного увеличения масштаба теневого изображения объекта контроля. Следует отметить, что использование метода томосинтеза или томографии может в несколько раз повысить чувствительность контроля и выявляемость дефектов. Однако реализация этих методов значительно увеличит время контроля и его стоимость, а аппаратура, их реализующая, будет иметь достаточно внушительные весогабаритные характеристики. Акустический метод контроля, а более точно ультразвуковой (УЗ) импульсный эхо-метод обеспечивает возможность визуализации внутренней структуры неоднородных материалов (к которым относятся бетон и железобетон) при одностороннем подходе к ним. Естественно, такие особенности метода в совокупности с возможностью представления результатов контроля в виде двумерного изображения сечения произвольной ориентации внутренней структуры исследуемых конструкций (томограмм), а также синтезирование трехмерного изображения обеспечивают ему ряд преимуществ и делают привлекательным для реализации в поисковой аппаратуре. Такая аппаратура обеспечивает диагностику изделий из бетона и железобетона при одностороннем подходе к их поверхности, что зачастую является единственной возможностью осуществления контроля. Бетон, железобетон и другие или подобные материалы, обладающие высокой неоднородностью внутренней структуры, являются весьма сложным объектом контроля, что обуславливается несколькими причинами. Во-первых, быстрый рост коэффициента затухания акустических волн от частоты делает практически невозможным использование сигналов с частотами более 200 кГц для контроля таких материалов. Причем уже в диапазоне от 100 до 200 кГц затухание растет столь значительно, что спектр принятого сигнала оказывается заметно ограниченным со стороны верхних частот. Во-вторых, крупнозернистая (в сравнении с длиной акустической волны) структура материала порождает сильный структурный шум, уровень которого тем больше, чем выше частота сигнала, что также ограничивает сверху возможности выбора рабочей частоты сигнала. В-третьих, обычно грубая, пористая и пыльная поверхность бетонной конструкции сильно затрудняет выбор и применение контактных смазок, делает акустический контакт аппаратуры с объектом контроля очень ненадежным и нестабильным. Проведение контроля при этом сопровождается значительными непроизводительными потерями времени на создание и поддержание акустического контакта. Последнее обстоятельство заставляет искать и оптимизировать пути использования сухого акустического контакта. Существенная неоднородность внутренней структуры объектов из бетона и железобетона является причиной высокого уровня структурных помех, одним из путей снижения которых является оптимизация зондирующего сигнала. С одной стороны, чем короче зондирующий сигнал, тем меньший уровень шума он создает, так как в этом случае шум – многократное наложение множества отражений зондирующего сигнала от неоднородностей внутренней структуры объекта контроля. С другой стороны, более короткий сигнал обладает более широким спектром, высокочастотная область которого может стать причиной повышенного шума. Наконец, исходя из требуемой разрешающей способности аппаратуры (5-10 см), пространственная длина сигнала не должна существенно превышать эту величину, что при скоростях распространения акустических колебаний в бетонах 2000 – 4000 м/с дает длительности сигналов порядка 15 – 50 мкс. Такие сигналы при средней частоте спектра 70 кГц могут содержать от 1,5 до 3 периодов заполнения. Технологические трудности создания ультразвуковых преобразователей, способных обрабатывать сигналы в 1,5 периода заполнения, существенно выше, чем преобразователей с более длительными (в периодах) сигналами. Вид зондирующего сигнала достаточно точно определяется через функцию s(t), моделирующую сигнал, принятый ультразвуковым преобразователем после излучения акустического импульса им же или аналогичным преобразователем, в однородную изотропную среду с точечным отражателем
где:
Присутствие в функции Хевисайда исключает из сигнала любые составляющие с временем задержки меньшим b. Это хорошо согласуется с физическими условиями задачи генерации, распространения и приема акустических сигналов. Данный сигнал при соответствующем выборе параметров а и х имеет вид радиоимпульса с колоколообразной огибающей и несколькими периодами заполнения. Структурный шум – это множество подобных сигналов со случайными задержками и амплитудными множителями, зависящими от величины задержки, так как большей задержке отвечает больший пройденный сигналом путь в объекте контроля и большее количество переотражений от его неоднородностей. Таким образом, шум можно представить в виде
где:
Здесь не учитываются искажения высокочастотной части спектра зондирующего импульса, вызванные ростом коэффициента затухания ультразвука от частоты, так как, во-первых, частота f выбрана так, чтобы не допустить существенных частотных искажений сигнала, а во-вторых, эти искажения дадут лишь некоторое занижение оценки уровня шума и на зависимость его от длительности сигнала практически не повлияют. На рис.3а приведены модели осциллограмм зондирующего сигнала и соответствующей реализации структурного шума, вызванной излучением этого сигнала в структурно-неоднородное полупространство. А на рис.3б приведены аналогичные модели осциллограмм для более короткого зондирующего сигнала. Рис. 3. Модели осциллограмм зондирующего сигнала длительностью: 50 ms (а) и 25 ms (б) и соответствующие им реализации структурного шума. Из приведенных рисунков видно, что уровень шума зависит от длительности зондирующего импульса. Структурная реверберация, в частности в бетоне, представляет собой многократные переотражения ультразвуковых волн между элементами крупного заполнителя, сопровождающиеся взаимной трансформацией продольных колебаний в поперечные и обратно. Как правило, размеры отдельных элементов заполнителя и расстояния между ними соизмеримы с длиной УЗ волны, поэтому энергия зондирующего импульса, излученная в бетон, в основном рассеивается на неоднородностях, расположенных в окрестности точки излучения, и лишь частично расходится к более удаленным слоям материала. В результате акустический шум, принимаемый УЗ преобразователем, затухает с момента излучения зондирующего импульса существенно медленнее, чем предсказывает расчет, не учитывающий вторичное и более сложное рассеяние. Реализации структурного шума, получаемые от повторных зондирований при неизменных положениях излучателя и приемника ультразвука, из-за стационарности среды полностью коррелированы между собой в совпадающие моменты времени. Однако при смене положений точек излучения и приема корреляция нарушается. Оценка основных статистических характеристик шума на частотах около 80 кГц по ансамблю реализаций, полученных в разных точках поверхности бетона как совмещенным УЗ преобразователем, так и парой преобразователей при неизменном расстоянии между ними, показала, что структурный шум – это нестационарный случайный процесс, у которого в любой фиксированный момент времени (исключая интервал приема сигналов поверхностных волн) закон распределения мгновенных значений структурного шума близок к нормальному с нулевым математическим ожиданием, а дисперсия в интервале 50 – 500 мкс от момента излучения зондирующего импульса уменьшается в среднем со скоростью 0,05 – 0,1 дБ/мкс. Обеспечить пространственную селекцию отражателей при ненаправленных УЗ преобразователях в принципе можно многоракурсным зондированием каждой точки исследуемого полупространства с его поверхности. Этот метод, находящий в последнее время применение при контроле мелкоструктурных материалов и в медицинской диагностике, физически аналогичен фокусировке УЗ излучения в каждую точку полупространства и фокусированному приему сигналов, отраженных от каждой зондируемой точки, и практически осуществляется путем сканирования поверхности полупространства УЗ преобразователями, синтезирующими приемно-излучающую апертуру больших волновых размеров. Данный метод синтезированной апертуры, фокусируемой в произвольную точку полупространства с когерентной обработкой данных можно отнести к одной из разновидностей многочастотной голографии. В литературе он известен как метод SAFT (Sinthetic Aperture Focusing Technique). При его использовании продольное разрешение (по глубине) в первом приближении определяется пространственной протяженностью акустического импульса, а в поперечном (по фронту) близко к длине акустической волны. Решение задачи обнаружения полезных сигналов на фоне структурного шума гармонично сочетается с решением задачи пространственной селекции отражателей методом SAFT. Действительно, поскольку нельзя существенно декоррелировать реализации структурного шума, полученные при неподвижных УЗ преобразователях, изменением параметров зондирующего импульса, то практически остается лишь возможность пространственного накопления сигнала при облучении отражателя и приеме эхо-сигналов с разных направлений на отражатель с поверхности объекта контроля, что и осуществляется в методе SAFT. Но для пространственного накопления сигнала с целью увеличения отношения сигнал/шум (с/ш), естественно требуется возможно большее число некоррелированных реализаций принятых колебаний, тогда как для осуществления лишь пространственной селекции (при отсутствии помех) синтезируемая апертура может быть разреженной. Для получения наибольшего числа некоррелированных реализаций необходимо правильно выбрать шаг сканирования УЗ преобразователями поверхности полупространства при синтезе апертуры (или шаг антенной решетки) и размеры активной поверхности преобразователя (элемента решетки). На рис. 4 схематично показан антенный преобразователь, выполненный в виде двухмерной матрицы элементарных точечных преобразователей, расположенных с шагом Dl (в первом приближении много меньшим длины волны) на поверхности объекта в пределах апертуры S. Каждый из элементарных преобразователей может как излучать, так и принимать ультразвуковые колебания. Несфокусированный совмещенный антенный преобразователь эквивалентен параллельному включению всех этих элементов, а для обеспечения фокусировки в произвольную точку F следует обеспечить возможность независимой фазировки каждого из элементов. Под фазировкой понимается создание для каждого элемента такой задержки (в электрическом или акустическом тракте) при излучении и приеме сигнала, чтобы возбуждаемые одним электрическим импульсом акустические сигналы от всех элементов одновременно приходили в точку F, а отраженные от нее сигналы после приема всеми преобразователями суммировались бы синфазно. Рис. 4. Схема матричного антенного преобразователя Для эхо-импульсного метода применительно к контролю бетона такая фазировка может осуществляться в цифровом виде на основе модифицированного метода SAFT-C, который отличается тем, что исходные реализации получают не только от каждого элементарного преобразователя антенной решетки (АР), работающего в совмещенном режиме, но и вместе с этим используются все сочетания пар преобразователей, расположенных в пределах апертуры. При этом, как нетрудно видеть, общее число получаемых некоррелированных эхо-реализаций М (включая совмещенный режим), составит
где: n – общее число элементов в апертуре. В этом случае общее число получаемых реализаций эхо-сигнала будет примерно в n/2 раз больше, чем для метода SAFT. Это обеспечит больший выигрыш для когерентного накопления полезных сигналов, что необходимо при контроле бетона из-за высокого уровня шумов в одиночной реализации. При использовании метода SAFT-C для каждой точки F с координатами x, y, z в реконструируемой плоскости рассчитывается величина условного коэффициента отражения по формуле:
где:
Предельный выигрыш в отношении сигнал/шум, определяемом через напряжение (что эквивалентно яркости результирующей томограммы), при условии когерентного накопления сигнала и некоррелированной помехи составит
При достаточно больших значениях n можно считать
Таким образом, в первом приближении, для метода SAFT-C выигрыш с/ш относительно одиночной реализации прямо пропорционален числу элементов АР. Следует учесть, что дополнительный выигрыш без увеличения числа элементов АР можно обеспечить совместной обработкой сигналов, полученных для нескольких неперекрывающихся положений апертуры на поверхности объекта. Общее число элементов n АР определяется размерами апертуры и шагом установки в ее пределах элементарных преобразователей, которые, в свою очередь, зависят от радиуса r корреляции структурного шума. Радиус корреляции r определяет такой минимальный размер круговой области на поверхности контролируемого пространства, при котором реализации шума (при отсутствии дефектов), принятые из точек в центре и на границе области при неподвижном излучателе, практически некоррелированы. Меньший, чем r шаг использовать бесполезно, так как дополнительного накопления сигнала от новых реализаций входных колебаний практически не будет, а общее число реализаций возрастет. Шаг расположения элементарных преобразователей в АР и шаг сканирования одиночным элементарным преобразователем поверхности объекта контроля в случае последовательного физического синтеза апертуры зависят также от размеров области контакта преобразователей. При использовании преобразователей с жидкостным контактом эти размеры, как правило, составляют (0,5-1,5) длины акустической волны в бетоне. При использовании преобразователей с сухим контактом размеры области контакта можно считать равными нулю. Связь площади акустического контакта элементарного преобразователя с минимальным шагом сканирования поверхности объекта, обеспечивающим слабую корреляцию структурных помех от соседних позиций преобразователя, подчиняется следующим положениям. Если преобразователь имеет размеры в несколько раз больше r, то при шаге сканирования равном r преобразователь в новом положении будет в значительной степени покрывать часть поверхности объекта контроля, которая была занята им в предыдущем положении, и принятые реализации могут заметно коррелировать между собой. В случае примерного равенства размеров преобразователя радиусу корреляции и шаге равном r между реализациями принятых колебаний, по-видимому, также будет заметная корреляция, так как значительная часть точек поверхности объекта контроля, принадлежащая новому положению преобразователя будет отстоять от точек предыдущего положения на расстояние меньшее r. Как показали эксперименты при диаметре активной поверхности преобразователей D » 1,5r минимальный шаг сканирования должен быть равен D. В основе выбора размеров активной поверхности УЗ преобразователя (диаметра или длины сторон, если он прямоугольный) для использования в качестве элемента АР лежат следующие соображения. Чем больше размеры элемента, тем больше отношение с/ш в одиночной реализации принятых этим элементом колебаний и, следовательно, меньшим числом накапливаемых реализаций можно достичь требуемого отношения с/ш в полученном изображении. Однако чрезмерное увеличение размеров элемента, естественно, приведет к недопустимому сужению его функции направленности и, как следствие, к ограничению размеров апертуры, которую можно синтезировать такими элементами. Размеры же синтезированной апертуры влияют не только на разрешающую способность аппаратуры, но и на результирующее отношение с/ш в построенной томограмме, которое тем больше, чем больше площадь апертуры, так как с большей площади можно снять большее количество реализаций УЗ колебаний. Изложенное позволяет сформулировать основные требования к апертуре, синтезируемой преобразователями с жидкостным контактом, для обеспечения наибольшего отношения с/ш в получаемой томограмме следующим образом:
Первое из этих требований означает, что каждая область поверхности исследуемого полупространства, попадающая в пределы синтезируемой апертуры, должна использоваться для излучения и приема УЗ колебаний и вносить вклад в суммарный эхо-сигнал. Второе требование максимизирует количество некорреляционных (по шуму) реализаций входных колебаний, которое можно получить от имеющегося ограниченного числа элементов апертуры. Иными словами, если апертура синтезируется n элементами, то каждый из них должен один раз проработать в паре с остальными n-1 элементами апертуры в качестве излучателя (или приемника) УЗ колебаний и один раз как совмещенный УЗ преобразователь. Для преобразователей с сухим контактом шаг элементов в апертуре следует брать равным или несколько меньшим радиуса корреляции. Возможность получения информации о пространственном распределении отражателей в структурно-неоднородном полупространстве с помощью матрицы конечного числа точечных УЗ преобразователей следует из того, что минимальное расстояние между соседними точками приема (или излучения) УЗ сигналов с поверхности такого полупространства, при котором можно получить практически некоррелированные реализации структурного шума, отлично от нуля и равно радиусу корреляции. Этот вывод следует из анализа зависимости коэффициента корреляции реализаций структурного шума от диаметра приемников акустических колебаний, установленных на поверхности полупространства. При стремлении D области акустического контакта приемников к нулю, начиная от диаметра, равного расстоянию между приемниками, коэффициент корреляции шума, уменьшаясь, стремится к конечной величине, отличной от нуля. Вследствие этого шаг сканирования таким приемником поверхности объекта при уменьшении D до нуля стремится не к нулю, а к вполне конечной величине, равной радиусу корреляции структурного шума. Таким образом, при построении АР с сухим контактом не требуется достижения малого шага решетки при весьма большом количестве ее элементов для пространственного накопления сигнала от какого-либо отражателя в объекте контроля. Требования к синтезируемой апертуре в случае точечных ее элементов отличаются от сформулированных выше для апертуры с жидкостным контактом только тем, что заполненность апертуры здесь понимается как отсутствие пустых мест в решетке с шагом r, а полное покрытие площади апертуры активной поверхностью не требуется. Сформулированные выше положения позволили разработать структурно-функциональные схемы и создать ряд образцов поисковой акустической аппаратуры для диагностики бетонных и железобетонных конструкций, а также изделий из структурно-неоднородных материалов, обеспечивающих контроль при одностороннем доступе к поверхности контролируемых объектов. Первые значимые результаты в области создания отечественных акустических поисковых средств, которые до настоящего времени не имеют зарубежных аналогов, выразились в разработке низкочастотного ультразвукового толщиномера КОНДЕНСАТОР-7” (УТ-201), представленного на фото 1, и поискового томографа “ОТЗЫВ-1” (УИ-201) – фото 2, предназначенных для измерения геометрических параметров и диагностики строительных конструкций из железобетона путем визуализации внутренней структуры объектов контроля. Фото 1. Ультразвуковой толщинометр УТ-201 Изделие УТ-201 состоит из трех основных модулей: процессорного блока, антенной решетки, а также тест-щупа для предварительной оценки скорости распространения ультразвука в объекте контроля. Комплекс УИ-201 включает антенную решетку, блок предварительной обработки и накопления информации, процессорный модуль, а также устройство непрерывной подачи контактной жидкости в зону рабочей плоскости антенной решетки. Фото 2. Ультразвуковой томограф УИ-201. Аппаратурные средства имеют значительные весовые характеристики: УТ-201 – до 8 кг, УИ-201 ~ 30 кг. Алгоритм их работы обеспечивает осуществление контроля при одностороннем подходе к объекту поиска. Однако их антенные решетки, представляющие собой жестко соединенные элементы-преобразователи, требуют жидкостного контакта и не обеспечивают надежной работы по неровным и шероховатым поверхностям. Чувствительность аппаратуры обеспечивает возможность контроля на глубины не более 500 мм. При этом размеры минимально выявляемого дефекта (локальная воздушная полость) составляют ~ 50 мм по диаметру. Следует отметить, что при формировании томографического среза время одного измерения для УИ-201 составляет не менее 50 сек. Следующим шагом в создании акустических поисковых средств была разработка аппаратуры, в которой были учтены и устранены отмеченные выше недостатки, являющиеся главным фактором, ограничивающим широкое применение как толщиномера, так и томографического комплекса. На фото 3 представлен современный ультразвуковой поисковый комплекс – томограф А 1230, включающий антенное устройство (АУ) на базе 36-элементной матричной антенной решетки, блок пространственно-временной обработки сигналов (антенный процессор) и персональную ЭВМ. АУ содержит многоканальное приемно-передающее устройство, управляемое от ЭВМ. Антенный процессор состоит из блока аналого-цифровой фильтрации и пространственно-временного спецпроцессора. В блоке аналого-цифровой фильтрации происходит первичная обработка сигналов с использованием априорно известных параметров принимаемых сигналов и помех, а также известных характеристик элементов АР и среды распространения УЗ колебаний. Пространственно-временной спецпроцессор выполняет синтез массива данных об отражающих свойствах точек исследуемого объема материала. Данные накапливаются в памяти ЭВМ, которая также управляет работой аппаратуры и служит для отображения полутоновых томограмм.
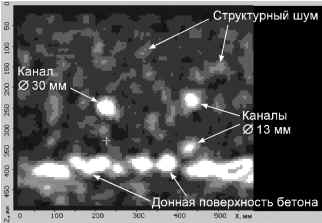
Фото 3. Ультразвуковой томограф А 1230 Поисковая аппаратура визуализирует внутреннюю структуру контролируемого объекта на глубину до 1000 мм и позволяет обнаружить в бетоне и железобетоне дефекты диаметром 30 мм и более. Разрешающая способность аппаратуры обеспечивает раздельное обнаружение указанных дефектов, если расстояние между ними не менее 100 мм. Получаемые изображения легко интерпретируются. Возможность быстрого послойного просмотра визуализируемого объема материала с представлением томограмм как В, так и С типа облегчает идентификацию протяженных дефектов, например, трещин, полостей, расслоений, а также донных поверхностей. На фото 4 (а-д) изображены наиболее характерные и наглядные томограммы полученные с помощью разработанной аппаратуры. Все томограммы типа В, поскольку С-томограммы менее выразительны из-за отсутствия на них донного сигнала. Уровни сигналов в томограммах на экране прибора могут представляться в виде цветовой палитры или оттенками серого цвета. На представленных изображениях использована серая шкала”, где большему уровню сигнала соответствует более светлый оттенок. Дефекты выглядят обычно как белые пятна. Горизонтальная ось Х совпадает с линией сканирования антенного устройства на поверхности обследуемой конструкции. Ось Z - это ось глубин. Оси проградуированы в миллиметрах. Все томограммы получены при шаге сканирования 80 мм. Этот шаг совмещает достаточно высокую чувствительность с приемлемой для многих случаев производительностью.
Фото 4. Томограммы бетонных блоков с различными дефектами:
На фото 4 (а) и (б) приведены томограммы бетонных блоков с просверленными в них каналами, имитирующими коммуникационные трубы. Каналы расположены параллельно доступной поверхности бетона и перпендикулярно линии сканирования. Крупный заполнитель бетона – гранитный щебень с наибольшей крупностью 10 мм. Образы каналов хорошо видны, особенно на глубинах менее 300 мм. Превышение уровней сигналов над средним уровнем структурного шума у каналов диаметром 30 мм более 18 дБ, у каналов диаметром 13 мм – 10 и 8 дБ. Меньший сигнал у канала, расположенного на глубине 345 мм (см. фото 4 (б)). Координаты образов по оси Х совпадают с истинными, по оси Z – наблюдается некоторое занижение глубины. Эта ошибка возрастает с уменьшением глубины залегания канала и увеличением его диаметра, что можно объяснить возрастанием отличий дефекта от его точечной модели, использованной в алгоритме синтеза томограмм. Так, например, канал диаметром 30 мм, ось которого находится на глубине 130 мм, расположен на томограмме на глубине 110 мм. Для канала диаметром 13 мм на глубине 345 мм эта ошибка практически равна нулю. Изрезанность образа донной поверхности бетона можно объяснить интерференцией отражений от плоскости, так как алгоритм синтеза апертуры настроен на отражения от материальных точек пространства. На фото 4 (в) представлена томограмма бетонного блока с параллельными каналами диаметром 30 мм, лежащими на глубине 160 мм на расстоянии друг от друга 80 мм. Этот блок изготовлен из бетона с известняковым заполнителем наибольшей крупности 20 мм. В результате дефекты обнаружены при отношении сигнала к структурному шуму около 12 дБ, что ниже, чем в предыдущем случае. Однако их можно легко разрешить один от другого. Донная поверхность блока здесь не видна, так как толщина блока равна 600 мм. Слева на томограмме виден образ выбоины на боковой поверхности блока. Фото 4 (г) иллюстрирует изображения от моделей дефектов в виде пустотных сфер диаметрами 35, 50 и 100 мм, центры которых расположены на глубинах 230 мм. Линия сканирования была выбрана так, чтобы все дефекты попали в плоскость изображаемого сечения. Бетон, из которого изготовлен этот блок, такой же, как у первых двух образцов, что позволяет оценить, насколько хуже обнаруживаются непротяженные дефекты. Отношения сигнал-шум на этой томограмме равны 8, 12 и 16 дБ, соответственно, для дефекта диаметром 35, 50 и 100 мм. Глубина образа 35 мм дефекта почти совпадает с истинной, глубины других занижены на 10-20 мм по указанной выше причине. Слева на томограмме на глубине 140 мм хорошо различим образ замоноличенного в бетон хвостовика подъемного крюка, выполненного из арматурной проволоки диаметром 10 мм. Томограмма (фото 4 (д)) снята при обследовании фундамента здания, построенного методом скользящей опалубки. Здесь внутри бетона находится двутавровая металлическая балка. Одна из плоских сторон балки параллельна доступной поверхности фундамента, по которой проводилось сканирование антенным устройством томографа. Линия сканирования была проведена горизонтально так, чтобы визуализируемое сечение прошло перпендикулярно продольной оси балки. Толщина бетона в этом месте фундамента 450 мм. Глубина расположения плоскости балки, обращенной к поверхности фундамента примерно 230-240 мм. Толщина металла балки - 20 мм. На томограмме металлическая балка выглядит как отражающая плоскость, затеняющая собой отражение от донной поверхности бетона. Образ донной поверхности находится в левой нижней части томограммы в интервале 70 – 270 мм по оси Х. Представленные изображения показывают, что созданная поисковая аппаратура позволяет обнаруживать в бетоне локальные дефекты, сравнимые по размерам с длиной волны ультразвуковых колебаний. Размер зерен крупного заполнителя бетона определяет естественный предел чувствительности прибора. Протяженные дефекты обнаруживаются с лучшим отношением сигнал - шум, несмотря на то, что все томограммы получены при фокусировании апертуры в каждую точку полупространства. Наличие в составе томографического комплекса А 1230 ЭВМ со специальным программным обеспечением позволяет осуществлять представление получаемой информации о внутренней структуре объекта контроля в трехмерном виде. Причем программа обеспечивает возможность предварительной обработки информации, выделять объекты поиска, реализовать многоракурсную визуализацию и т.п. На фото 5 представлен один из вариантов вывода информации в трехмерном виде. Фото 5. Трехмерное изображение внутренней структуры объекта контроля. В процессе создания поисковых аппаратурных средств, предназначенных для контроля строительных конструкций из бетона и железобетона, накоплен значительный объем информации, найден ряд технико-технологических решений, определены методики, получен ряд результатов, позволяющий без особых дополнительных затрат создать аппаратурные средства, функциональным назначением которых может быть оценка качества бетонных и железобетонных конструкций, их прочности. Над созданием таких аппаратурных средств целенаправленно трудятся специалисты ряда зарубежных научных центров, среди которых Институт Кэмбриджа (Cambridge Ultrasonic) и Институт в Дармштате (Institute fur Massivbau Darmstadt) добились наиболее значимых результатов. Следует, однако, подчеркнуть, что результаты исследований этих научных школ все же значительно отстают от изложенных выше. Актуальность работ по бетону и железобетону определяется тем, что этот материал стал основным строительным материалом ХХ века. В мире построено огромное количество бетонных сооружений: мосты, плотины, тоннели, промышленные и жилые здания, дороги, судоходные и оросительные каналы, многоэтажные парковки, спортивные сооружения и т.п. для обеспечения безопасного функционирования этих сооружений требуется их диагностика, обеспечивающая контроль состояния, оценку запаса прочности. Для решения диагностических задач сегодня можно преложить ряд поисковых технических средств, адаптированных под изложенную проблему. На фото 6 представлен ультразвуковой тестер УК 1401, предназначенный для оценки прочности бетонных и железобетонных конструкций. Оценка прочности основана на корреляции скорости распространения ультразвуковых волн в материале с его физико-механическими характеристиками и физическим состоянием. Наиболее эффективно настоящее изделие для оценки несущей способности бетонных столбов и опор, поиска приповерхностных дефектов, оценки степени анизотропии и текстуры композитных материалов. Фото 6. Ультразвуковой тестер УК-1401 Для диагностики железобетонных изделий как эхо-методом, так и теневым методом разработан ультразвуковой дефектоскоп А 1220, представленный на фото 7. При контроле эхо-методом он позволяет обнаруживать локальные дефекты в виде пустотных сфер диаметром от 50 мм и более на глубинах до 500 мм и протяженные дефекты типа пустотных цилиндров диаметром от 30 мм и более на тех же глубинах. Донную поверхность можно обнаружить на глубинах до 1 метра. А 1220 представляет собой электронный блок с графическим индикатором и клавиатурой управления. Для контроля эхо-методом с ним используется 24-элементная синфазная антенная решетка, а для контроля теневыми методами отдельные ультразвуковые преобразователи продольных или поперечных волн.
Фото 7. Ультразвуковой дефектоскоп А 1212 А 1220 отображает результаты контроля в двух видах: в виде А-развертки как обычный дефектоскоп для металлов и в виде В-развертки, представляющей собой изображение среза объекта контроля, близкое по виду к томограмме. Отличие состоит в том, что здесь используется только два значения яркости в каждой точке. В-изображение синтезируется прибором в результате сканирования решеткой поверхности объекта контроля. Помимо обнаружения дефектов и измерения толщины изделие А 1220 позволяет оценивать структуру и прочностные характеристики неметаллов. Достаточно широкие возможности прибора обусловлены в немалой степени наличием инфракрасного порта связи, обеспечивающего передачу данных в компьютер с последующей их обработкой и представлением в необходимом виде. Таким образом, в настоящей статье в достаточно сжатой форме изложен подход к решению задачи диагностики изделий из бетона и железобетона акустическим методом. Представлены наиболее интересные разработки, зарубежные аналоги которых, по крайней мере нам, не известны. Следует полагать, что рассмотренные функциональные возможности аппаратуры не ограничены поисковыми задачами и проблемами, связанными с техногенной безопасностью. Весьма вероятно, что акустические поисковые средства будут достаточно эффективны при решении широкого спектра задач и, в первую очередь экологических. |
 ,
, ,
,
 ,
,